# Import required libraries
import numpy as np
import pandas as p
import tensorflow as tf
import matplotlib.pyplot as plt
from tensorflow.keras.datasets import mnist
from tensorflow.keras import layers, models, optimizers, regularizers
from scipy.stats import norm
%matplotlib inline
# Get a subset of the mnist data
x_train, x_test = np.load('mnist_mini_train.npy'), np.load('mnist_mini_test.npy')
Preprocessing Images¶
As per the original paper on VAE Kingma et al, we make an Independent Bernoulli assumption on all of the pixels of our image.
However, the original MNIST image pixel values are not labels but values between 0 & 255.
Hence we must convert the individual pixel values to a Bernoulli distribution.
We can do that by choosing a threshold, and assigning value 1 if the pixel value is above the threshold, else zero.
# Function to
# 1. Change dimensions
# 2. Change datatype
def binary_preprocess(imageset):
imageset = imageset.reshape(imageset.shape[0],28,28,1)/255.
return np.where(imageset > .5, 1.0,0.0).astype('float32')
# Pre-processed images to satisfy the Independent Bernoulli condition
x_train_images = binary_preprocess(x_train)
x_test_images = binary_preprocess(x_test)
# Dataset object to get a mini-batch
batch_size = 100
train_size = x_train_images.shape[0]
latent_size = 2
input_shape = (28,28,1)
# Model encoder architecture
encoder = tf.keras.Sequential(
[
tf.keras.layers.InputLayer(input_shape=(28,28, 1)),
tf.keras.layers.Flatten(),
tf.keras.layers.Dense(128,activation='relu'),
tf.keras.layers.Dense(32,activation='relu'),
# No activation
tf.keras.layers.Dense(4),
]
)
# Model decoder architecture
decoder = tf.keras.Sequential(
[
tf.keras.layers.InputLayer(input_shape=(2,)),
tf.keras.layers.Dense(32, activation='relu'),
tf.keras.layers.Dense(128, activation='relu'),
tf.keras.layers.Dense(784,activation='sigmoid'),
tf.keras.layers.Reshape((28,28,1))
]
)
# Encoding step
# Note: We use logvariance instead of variance
# Get the mean and the logvariance
def encode(encoder,x):
activations = encoder(x)
mean, logvariance = tf.split(activations,num_or_size_splits=2,axis=1)
return mean,logvariance
# Reparametrization step
def sample(mu, logvariance):
# Here we sample from N(0,1)
e = tf.random.normal(shape=mu.shape)
return e * tf.exp(logvariance/2) + mu
# Combine the autoencoder
def autoencoder(encoder,decoder,x):
mean,logvariance = encode(encoder,x)
z = sample(mean,logvariance)
output = decoder(z)
return output
Log space¶
We will be using log loss. This is because numerically is more stable.
Log Normal PDF¶
$$f(x)=\frac{1}{\sigma \sqrt{2 \pi}} e^{-\frac{1}{2}\left(\frac{x-\mu}{\sigma}\right)^{2}}$$$$ \log f(x)= -\log(\sigma) -\frac{1}{2} \left(\log(2 \pi) -(\frac{x-\mu}{\sigma})^2)\right)$$KL Divergence Analytical form¶
We will use this analytical form to compute the KL divergence
$\mathrm{KL} [ q_{\phi}(\mathbf{z} | \mathbf{x}) || p(\mathbf{z}) ] = - \frac{1}{2} \sum_{k=1}^K { 1 + \log \sigma_k^2 - \mu_k^2 - \sigma_k^2 }$
where $K$ is the number of hidden dimensions.
Reconstruction loss:¶
Binary CrossEntropy
$H_{p}=-\frac{1}{N} \sum_{i=1}^{N} \sum_j y_{ij} \cdot \log \left(p\left(y_{ij}\right)\right)+\left(1-y_{ij}\right) \cdot \log \left(1-p\left(y_{ij}\right)\right)$
where $p(y_i)$ is the output of the NN, $N$ is the number of images and $j$ represents the pixel.
# Quick way to get the log likelihood of a normal distribution
def log_normal_pdf(value, mean, logvariance, raxis=1):
log_2pi = tf.math.log(2. * np.pi)
logpdf = -(logvariance + log_2pi + (value - mean)**2. * tf.exp(logvariance))/2
return tf.reduce_sum(logpdf,axis=1)
# Loss over the assumed distribution(qz_x) and the prior(pz)
def analytical_kl(encoder,x):
mean, logvariance = encode(encoder,x)
# tf.reduce_sum is over the hidden dimensions
lossval = tf.reduce_sum(-0.5*(1 + logvariance - tf.square(mean) - tf.exp(logvariance)),axis=-1)
return tf.reduce_mean(lossval)
# This is now binary cross entropy
# Crucially, observe that we sum across the image dimensions
# and only take the mean in the images dimension
def reconstruction_loss(encoder,decoder,x):
x_pred = autoencoder(encoder,decoder,x)
loss = tf.keras.losses.binary_crossentropy(x,x_pred)
# tf.reduce_sum is over all pixels and tf.reduce_mean is over all images
return tf.reduce_mean(tf.reduce_sum(loss,axis=[1,2]))
# Instantiate an optimizer with a learning rate
optimizer = tf.keras.optimizers.RMSprop(learning_rate=1e-3)
# Define number of epochs
num_epochs = 300
# Loop over the required number of epochs
for i in range(num_epochs):
for j in range(int(train_size/batch_size)):
# Randomly choose a minitbatch
x_train_batch = x_train_images[np.random.choice(train_size,batch_size)]
# Open the gradienttape to map the computational graph
with tf.GradientTape(persistent=True) as t:
decoder_output = autoencoder(encoder,decoder,x_train_batch)
L1 = reconstruction_loss(encoder,decoder,x_train_batch)
L2 = analytical_kl(encoder,x_train_batch)
# Adding the reconstruction loss and KL divergence
loss = L1 + L2
# We take the gradients with respect to the decoder
gradients1 = t.gradient(loss, decoder.trainable_weights)
# We take the gradients with respect to the encoder
gradients2 = t.gradient(loss, encoder.trainable_weights)
# We update the weights of the decoder
optimizer.apply_gradients(zip(gradients1, decoder.trainable_weights))
# We update the weights of the decoder
optimizer.apply_gradients(zip(gradients2, encoder.trainable_weights))
# We display the loss after every 10 epochs
if i+1%10==0:
print(f'Loss at epoch {i+1} is {loss:.2f}, KL Divergence is {L2:.2f}')
Visualize stochastic predictions¶
# We choose a text sample index
test_sample = 10
# We make a prediction
# NOTE: Since we did not add a sigmoid activation,
# We must specify it now to convert logits to probabilities
pred = autoencoder(encoder,decoder,x_test_images[test_sample:test_sample+1])
# We make class predictions for each pixel (ON or OFF)
pred = np.where(pred>0.5,1,0)
pred = pred.squeeze()
pred.shape
# We plot the reconstruction with the true input
fig, ax = plt.subplots(1,2)
ax[0].imshow(x_test_images[test_sample].squeeze(),cmap='gray')
ax[1].imshow(pred,cmap='gray')
ax[0].set_title('True image',fontsize=14)
ax[1].set_title('Reconstruction',fontsize=14);
ax[0].axis('off');
ax[1].axis('off');
plt.show()

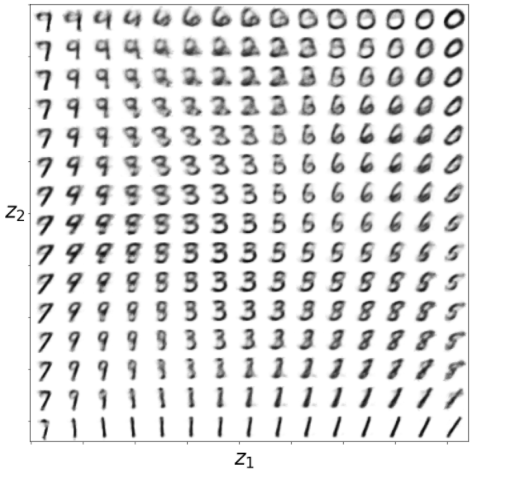
# display a 2D manifold of the digits
n = 15 # figure with 15x15 digits
digit_size = 28
latent_dim = 2
# linearly spaced coordinates on the unit square were transformed
# through the inverse CDF (ppf) of the Gaussian to produce values
# of the latent variables z, since the prior of the latent space
# is Gaussian
z1 = norm.ppf(np.linspace(0.01, 0.99, n))
z2 = norm.ppf(np.linspace(0.01, 0.99, n))
z_grid = np.dstack(np.meshgrid(z1, z2))
x_pred_grid = tf.sigmoid(decoder.predict(z_grid.reshape(n*n, latent_dim))).numpy() \
.reshape(n, n, digit_size, digit_size)
fig, ax = plt.subplots(1,1, figsize=(10,10))
ax.imshow(np.block(list(map(list, x_pred_grid))),cmap='binary')
# ax.axis('off')
ax.set_xlabel('$z_1$ ', fontsize=32)
ax.set_ylabel('$z_2$ ', fontsize=32,rotation=0)
ax.set_xticklabels('')
ax.set_yticklabels('')
plt.tight_layout()
